Article Text

Abstract
Robotic-assisted technology has been used as a tool to enhance open and minimally invasive surgeries as well as percutaneous coronary and peripheral vascular interventions. It offers many potential benefits, including increased procedural and technical accuracy as well as reduced radiation dose during fluoroscopic procedures. It also offers the potential for truly “remote” procedures. Despite these benefits, robotic technology has not yet been used in the neuroendovascular field, aside from diagnostic cerebral angiography. Here, we report the first robotic-assisted, therapeutic, neuroendovascular intervention performed in a human. This was a stent-assisted coiling procedure to treat a large basilar aneurysm. All intracranial steps, including stent placement and coil deployment, were performed with assistance from the CorPath<sup>©</sup> GRX Robotic System (Corindus, a Siemens Healthineers Company, Waltham, MA, USA). This represents a major milestone in the treatment of neurovascular disease and opens the doors for the development of remote robotic neuroendovascular procedures.
- Aneurysm
- Coil
- Technology
- Stent
- Brain
This is an open access article distributed in accordance with the Creative Commons Attribution Non Commercial (CC BY-NC 4.0) license, which permits others to distribute, remix, adapt, build upon this work non-commercially, and license their derivative works on different terms, provided the original work is properly cited, appropriate credit is given, any changes made indicated, and the use is non-commercial. See: http://creativecommons.org/licenses/by-nc/4.0/.
Statistics from Altmetric.com
Background
Unruptured intracranial aneurysms larger than 7 mm are at high risk of rupture with potentially devastating consequences.1 2 Craniotomy with surgical microclipping or neuroendovascular coiling has been the traditional choice of treatment; however, adoption of other interventions such as balloon-assisted or stent-assisted procedures continues to grow. New technical measures that can improve the ease and safety of these interventions, such as robotic technologies, are therefore of interest. In this report, we describe the first use of a robotic system to assist in a therapeutic neuroendovascular intervention.
Case presentation
In October 2019, a 64-year-old woman presented with severe unexplained vertigo. She was a non-smoker and had no hypertension and no relevant family history of intracranial aneurysms.
Investigations
CT angiography and MRI showed a wide-necked, >10 mm saccular sidewall aneurysm originating off the distal basilar artery (figure 1A). This was causing no oedema in the surrounding brain parenchyma. Imaging also showed a tortuous pathway through the vertebral arteries.

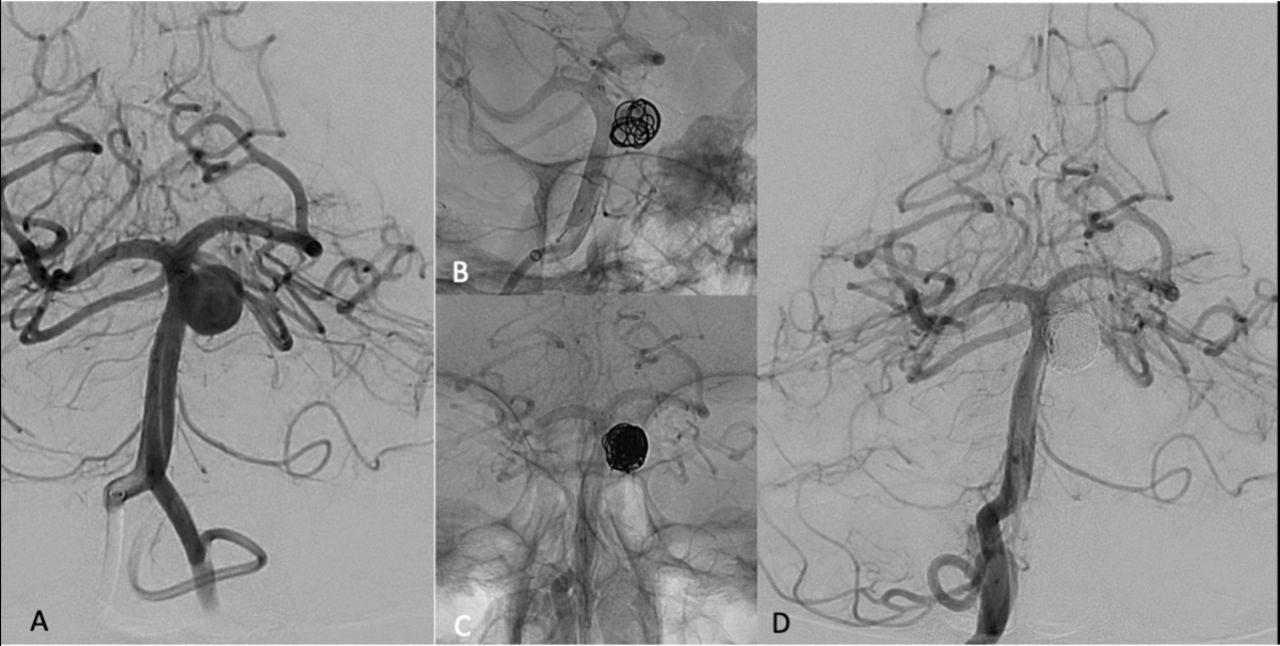
Digital subtraction angiography (DSA) images during the robotic-assisted neurointerventional procedure (anterior-posterior view). (A) Preoperative imaging of a right vertebral injection showing the sidewall basilar trunk aneurysm measuring 12 mm × 11 mm. (B) DSA per-procedure imaging showing the Atlas stent deployed at the basilar artery below the bifurcation and across the aneurysm neck, and the first coil deployed inside the aneurysm. (C) Final DSA demonstrating the final coil cast. (D) Final DSA showing the aneurysm occluded and a patent stent, with no perioperative complications.
Treatment
Given the size and high-risk location of the aneurysm, definitive treatment was recommended. After a discussion of the relative risks and benefits of stent-assisted neuroendovascular coiling versus open surgical microclipping, the patient consented to elective neuroendovascular intervention with assistance from a robotic system. She was placed on ticagrelor 180 mg/day and aspirin (ASA) 81 mg for 5 days prior to treatment.
The CorPath GRX Robotic System (Corindus, a Siemens Healthineers Company, Waltham, Massachusetts, USA) is currently cleared for percutaneous coronary and peripheral vascular interventions (PCI and PVI) in the USA, European Union and other select countries, and for neuroendovascular intervention in the European Union, Australia and New Zealand. It is not currently cleared for any use in Canada. Therefore, the robotic system was approved for off-label use for this procedure under a Special Access application submitted by the treating interventionalist to Health Canada. The general set-up of the robotic system has been described previously (figure 2).3 Briefly, arterial access and guiding catheter placement are performed manually. Next, the tableside, articulating robotic arm is moved to bring the drive system and a single-use cassette into position for patient access. Interventional devices—catheters, guidewires, stent systems and coiling systems—are loaded by a tableside assistant into appropriate tracks of the cassette, which serves as the sterile interface between the robotic system and the patient. The interventionalist sits behind a mobile, radiation-shielded workstation and uses joysticks and touchscreen controls to advance, retract, rotate and deploy the devices as needed. Recent software and engineering modifications specific to neuroendovascular procedures were described recently and included an ‘advanced cassette’ and accessory kit designed to accept and manage microcatheters, coil-assist stents and coiling systems, and a software automation called the Active Device Fixation, which allows for more precise control of the relative positions of the devices as they move.4

CorPath GRX Robotic System. (A) Robotic arm with advanced cassette. (B) The set-up of the procedure. The primary neurointerventionalist was located in the corner of the angiography room in a radiation-shielded workstation. At bedside, the team consisted of the specialised robotic technologist and two neurointerventionalists who load the devices and control the perfused lines and hubs.
The treating physician and team spent more than 30 hours familiarising themselves with the system using a variety of patient-specific simulators. On the day before the procedure, the complete interventional team performed two full procedure rehearsals to plan the steps and communication protocols while using a patient-specific flow model of the relevant neurovascular anatomy. The model was three-dimensionally printed by Biomodex (Dassault Systemes, France), based on the patient’s 4D CT Angiogram (4DCTA) data.
The clinical procedure was performed under general anaesthesia. Intravenous heparin bolus and maintenance doses were administered to maintain an activated clotting time of approximately 300 s throughout the procedure. At bedside, a specialised robotic technologist managed the loading and exchange of devices within the robotic system, and two neurointerventionalists remained with the patient for safety purposes. The primary neurointerventionalist (VMP) operated the robot from the mobile workstation, which was situated at the distal end of the angiography room from the patient.
For the manual portion of the procedure, a 6F, 0.088-inch inner diameter, 90 cm femoral sheath (Neuron MAX 088; Penumbra, Alameda, California, USA) was placed and advanced to the right subclavian artery. An intermediate catheter (Sofia 6F; Microvention, Irvine, California, USA) was then advanced up the V4 segment of the right vertebral artery. In preparation for the robotic portion of the procedure, a 1.7F microcatheter (Excelsior SL-10; Stryker Neurovascular, Fremont, USA) and 0.014-inch microwire (Synchro; Stryker Neurovascular) were loaded into the robotic cassette, and the robotic arm was brought into position for the procedure.
Using the robotic controls at the control console, the primary interventionalist advanced the microwire into the P1 segment of the right posterior cerebral artery, followed by the microcatheter. The microwire was removed from the robotic cassette and exchanged for a 4.5 mm × 21 mm Neuroform Atlas nitinol self-expanding microstent (Stryker Neurovascular), which was advanced through the microcatheter to the distal basilar artery. The microcatheter was then slowly retracted using millimetric controls on the touchscreen panel of the control console to enable stent deployment within the basilar artery, beginning just proximal to the basilar bifurcation and extending across the neck of the aneurysm.
With the stent fully deployed, the stent delivery device was removed from the robotic cassette and exchanged for the microguidewire again, which was navigated, under robotic control, through the interstices of the stent wall into the aneurysmal lumen. The microcatheter was advanced over the microwire, which was removed from the robotic cassette and exchanged for the first embolic coil (Medtronic Neurovascular Axium Prime, 10 mm × 20 cm). The coil was slowly advanced, taking care not to allow the distal end of the coil to cross the stent back out into the lumen of the basilar artery. Once the first coil was fully deployed into the aneurysmal sac and detached from its delivery device, additional successive coils of progressively smaller sizes were exchanged into the robotic cassette and similarly deployed into the aneurysmal lumen, all under robotic control (figure 1B,C). The eighth coil encountered resistance during deployment, and the resulting back-pressure forced the microcatheter back out of the aneurysm. The microcatheter was repositioned robotically, but when the coil was advanced again it met with additional resistance, causing the robotic cassette to register an error. The coil was removed and the cassette replaced with a new cassette. Six additional, smaller coils were placed without incident, with the smallest coil being 2.5 mm × 6 cm. Final angiogram confirmed a well-packed aneurysm and a stent within the lumen of the basilar artery, completely crossing the aneurysmal neck (figure 1D).
To close the procedure, all devices were removed from the patient and femoral haemostasis was achieved by 8F Angio-Seal closure device (Terumo Medical, Phoenix, Arizona). She was brought to the post anesthesia (PACU) for recovery. Procedure time was 2 hours and 9 min.
Outcome and follow-up
The patient experienced no complications and was discharged on the day following the procedure. Follow-up MRI/MR Angiogram (MRA) performed 2 weeks later showed complete obliteration of the aneurysm. At the time of this report, the patient is doing well and has returned to normal activities.
Discussion
In this report we describe the first clinical use of robotic assistance for neuroendovascular intervention. While originally designed to manipulate the larger-gauge devices used for PCI and PVI, the robotic system has undergone a number of engineering and software modifications to facilitate the use of smaller microcatheters and microwires, and longer working lengths, necessary for intracranial access and intervention.
Robotic technology is used for procedural assistance in an increasing number of surgical and interventional specialties. In neurosurgery, robotic assistance has been used for epilepsy evaluation,5 subcortical surgery6 and spine surgery.7 We identified only one report of a robotic system used for cerebral angiography, in which Vuong and colleagues8 describe the use of the Magellan Robotic Catheter System (Hansen Medical, Mountain View, California, USA), but no intervention was performed nor was the system adapted to microcatheter and microwire manipulation.
The CorPath robotic platform has been in use since 2012 for PCI and was subsequently cleared in the USA for PVI. Experience with these indications has shown that the key benefits of robotic assistance include increased procedural and technical accuracy, as well as reduced radiation dose during fluoroscopic procedures. It also offers the potential for truly ‘remote’ procedures.3 9–11
The set-up for a robotic intervention is different from a classic neuroendovascular procedure. Instead of one operator team beside the patient, there are two teams in the robotic intervention, one at bedside and another at the remote console, both of which have to work in tune and in close communication during all steps of the procedure. When preparing this procedure, two rehearsals with a patient-specific model (EVIAS, Biomodex, Paris, France) were performed, and in addition to practising the procedure itself we also worked on the communication and commands to be used during the procedure.
In our view, assistive robotic technologies have the potential to expand the current boundaries of neurointervention; however, no technology is without limitations. In particular, some interventionalists may wonder about the loss of tactile feedback felt during manual procedures. Using the robotic system, we found that our ability to detect obstacles and friction visually, by watching for subtle changes in the shape and motion of devices, was more than sufficient to compensate for the altered sensory profile. The console offers better visualisation of the screen compared with the bedside (figure 3) and the operator is seated comfortably, operating the robotic arm through the joysticks and the touchscreen controls. Again, successful adaptation to robotic assistance and realisation of its full benefits will depend on training, focus and team communication. The addition of force-sensing and feedback technology, along with additional automations for the navigational system, are areas for future exploration.

{kind=link}
{kind=link}
{kind=link}
The operator’s perspective. (A) The screen and the control console. The robotic arm is operated using three joysticks: one for microcatheter, one for microwire and one for the devices (stent and coils). (B) Closer view of the control console showing the screen during coil placement. The small screen shows three columns, each corresponding to a joystick, with additional commands such as millimetric moves for the microcatheter and devices or predefined rotations for the microwires.
Our patient had a high-risk aneurysm with tortuous anatomy and a location close to the basilar tip, potentially complicating stent placement. Although the neurointerventionalist in this case was highly experienced and could have managed this case manually, this scenario represented an excellent example of the kinds of cases in which the robot’s smooth, precise movements were advantageous for navigation, stent placement and coiling. We found the system easy to use, and also found that preprocedural training and preparation, clear definition of roles, and structured communication protocols were essential to the team’s comfort with this new technology.
Learning points
Neuroendovascular intervention using robotic assistance is feasible.
Robotic assistance improves the precision of neuroendovascular procedures while reducing radiation exposure to the interventionalist.
Robotic systems such as the one used here open up the possibility of remote intervention, such as for stroke treatment.
Team training, communication and preparation are essential in the successful adoption of this technology.
Acknowledgments
JM provided professional medical writing assistance. The medical writer worked at the direction of the authors.
Footnotes
Twitter @VitorMendesPer1
Funding The authors have not declared a specific grant for this research from any funding agency in the public, commercial or not-for-profit sectors.
Competing interests VMP, NC, PN, IR, and TK have no conflicts to disclose. KED, JMS, and AT are employees of Corindus.
Patient consent for publication Obtained.
Provenance and peer review Not commissioned; externally peer reviewed.